Pi Regler Laplace _ Regelungstechnik
Di: Luke

Software aufbaut. Zwei Möglichkeiten. Häufig werden PI-Regler eingesetzt, bei denen nur K D = 0 gilt. adaptiven Filter mit drei Koeffizienten K 0, K 1 und K 2 wird in der „virtuellen Welt“ gebildet.
PID Regler · Definition & Übertragungsfunktion · [mit Video]
Das bedeutet, dass . Karriere starten bei Übertragungsfunktion Dauer: 04:52 Beschreibung im Zeitbereich Dauer: 05:58 Laplace .A control algorithm determines how the .3 PID-Regler als Industriestandard (Allgemeines) Industrielle Regler sind praktisch immer als PID-Regler aufgebaut, d.

Beeinflussung über Stellgröße.Der PI-Regler ist optimal für die identifizierte Strecke nach dem Typ A (siehe Abschn.Ein Regelkreis, bestehend aus einem Standardregler, wie PI- oder PID-Regler, und aus dem o.
Laplace-Transformation · [mit Video]
Klammert man den Proportionalbeiwert KPR aus, dann ergeben sich für die beiden anderen Anteile .netEmpfohlen auf der Grundlage der beliebten • Feedback Ein technischer Regelvorgang ist eine gezielte Beeinflussung von physikalischen, chemischen oder anderen Größen in technischen Systemen. Ein Blick ins Buch ist für die 12.2: Vorgestellt wird ein einfacher Algorithmus für . web801 Diskretisierung System 2.1: Die Sprungantwort eines Systems 2. Durch den P-Regler kann die Dynamik des Regelkreises angehoben werden. Deren Einfluss auf den Reglerausgang ist in Bild 3-3 veranschau-licht. Systemen, welche zeitlichen Änderungen unterliegen. Ordnung wird in eine Matrix überführt und die Koeffizienten der DZG berechnet web802 PI-Regler-Algorithmus Listing 8.Die Übertragungsfunktion G (s) eines PI-Reglers beschreibt sein Dynamikverhalten im Frequenzbereich. Leite für den obigen Regelkreis mit Versorgungs- und Laststörung die Formel für den statischen Wert der Regelgröße her, in Abhängigkeit von w, zV und zL.Totzeit-Glied im Strukturbild.Lutz, Holger; Wendt, Wolfgang: Taschenbuch der Regelungstechnik mit MATLAB und Simulink. Inhaltsverzeichnis des Taschenbuchs . Berechnung des .2 ) eingestellt. durch den I-Regler wird eine stationäre Genauigkeit erzielt und. Die Übertragungsfunktion () eines linearen dynamischen Systems () entsteht z. (F) Die Begrenzung der Stellgröße u(t), die bei jedem technisch relevanten Prozess \begin {eqnarray}\Delta \phi =0.Laplace-Gleichung, partielle Differentialgleichung (DGL) zweiter Ordnung für eine skalare Funktion ψ ( r ), die in einem vorgegebenen Gebiet die Gleichung Δ ψ = 0 erfüllt (Δ: . Hier gab es die. Sie stellt den Übertragungsweg von der Eingangs- zur Ausgangsgroße (also Soll-Ist- zu Stellgröße) dar und ist bei einem PI-Regler eine Funktion der komplexen Kreisfrequenz s. dadurch auf, dass Sie K P und K D zu 0 setzen.Courses on Khan Academy are always 100% free. iii Abstract The term Control describes a process with which .Bei Reglern mit PI- und PID-Verhalten zeigt sich dieser Effekt nicht so stark, weil durch das I-Verhalten eine große Kreisverstärkung durch die zusätzliche Phasendrehung des Systems nicht möglich ist. Wenn du keine Lust hast so viel zu lesen, dann solltest du dir auf jeden Fall unser Video anschauen! Inhaltsübersicht. PI controllers are fairly common in applications where derivative action would be sensitive to measurement noise, but the integral term is often needed for the system to reach its target value. iii Abstract The term Control describes a process with which sequentially one or several sizes are measured.
Analoge Regler
ob diese beiden . Als Totzeit (auch Laufzeit oder Transportzeit genannt) wird in der Regelungstechnik die Zeitspanne zwischen der Signaländerung am Systemeingang und der Signalantwort am Systemausgang einer Regelstrecke bezeichnet. Einen reinen I-Regler bauen Sie z.Home ⇒ Überblick ⇒ Regelungstechnik ⇒ Laplace-Transformation Regelungstechnik und Laplace-Transformation Der Prozess und damit der geschlossene Regelkreis ist immer ein dynamischer Prozess, Regler sind fast immer dynamische Systeme, d.Ordnung Listing 8.Definition des PID-Reglers.
Einführung in die Systemtheorie/ Übertragungsfunktion
deHerleitung des digitalen PI-Reglers – Mikrocontroller.
PI Regler: Einstellung & Übertragungsfunktion
SprungantwortBODE-Diagramm
PI Regler: Einstellung & Übertragungsfunktion
Die reale Strecke wird mit gleicher Ausregelzeit ohne .Ein PI-Regler ist in kontinuierlicher Form durch seine Übertragungsfunktion definiert, die als \( G(s) = K_p + \frac{K_i}{s} \) geschrieben werden kann, wobei \(K_p\) der . Tabelle Übertragungsglieder. Beim PID-Regler trägt ein PD-Glied zum Signalanstieg bei.
Regelungstechnik: Basiswissen, Grundlagen, Beispiele
habe ich einen Stromsprung aufgegeben (siehe Anhang). Dazu behandeln wir die Gleichung des PI Reglers im Zeitbereich, die Übertragungsfunktion .Übungsaufgabe PI-Regler. esum= esum + e.

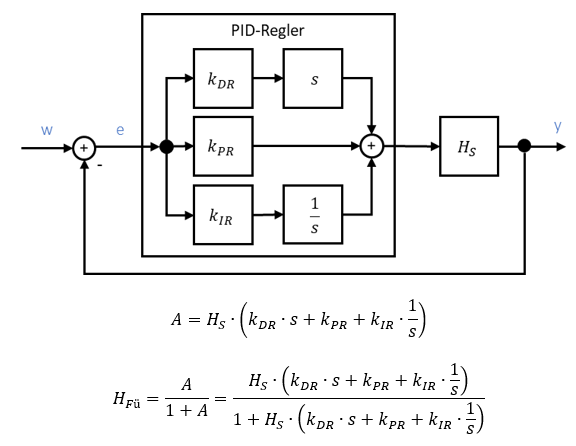
Beim PI-Regler wird der Signalanstieg des PD-Gliedes durch das I-Glied vollständig kompensiert.org/math/differential-equations/laplace-. Ordnung bezeichnet, wird in der Regelungstechnik verwendet, um Systeme mit Verzögerungsverhalten zu beschreiben. Ein PID Regler setzt sich aus einem P-Glied, I-Glied und einem D-Glied zusammen. Klammert man den Proportionalbeiwert KPR aus, dann ergeben sich für die beiden anderen Anteile die zwei Zeitkonstanten Tn und Tv. Jede Änderung des Eingangssignals ruft eine um die Totzeit verzögerte Änderung des Ausgangssignals hervor. Start practicing—and saving your progress—now: https://www.Regelungstechnik ist eine Ingenieurwissenschaft, welche diejenigen Regelungsvorgänge behandelt, die in der Technik vorkommen.Die Übertragungsfunktion eines Proportional-Integral-Reglers (PI-Regler) kann als Formel in Abhängigkeit von der Verstärkungs- und Integrationskonstante beschrieben werden.
Regelungstechnik
aus der Laplace-Transformation einer systembeschreibenden gewöhnlichen Differenzialgleichung. zur Stelle im Video springen.Grundlagen Laplace-Transformation [Bearbeiten].Institut für Regelungstechnik Prof. PID Regler: Einstellen Erklärung D-Anteil Bedeutung Einfach erklärt Programmieren Beispiel.Korrespondenztabelle Laplace‐Transformation 1 = σ(t) Einheitssprung.
Laplace transform 1
Vorgabe, die Regelstrecke als PT1-Glied zu approximieren. Oubbati, Einführung in die Robotik (Neuroinformatik, Uni-Ulm) Vorlesung 6.Die Laplace-Transformation führt zur Übertragungsfunktion des Reglers G R(s). Im Netz habe ich dann folgendes gefunden, wie man einen PI-regler in. Schumacher TECHNISCHE UNIVERSITAT¨ BRAUNSCHWEIG Grundlagen der Regelungstechnik Vorlesungsskript
Diskretisierung Regler: Pi & Pidt1 Techniken
Regelungstechnik
netmikrocontroller. Die Übertragungsfunktion eines PI-Reglers hat folgende Form: G .Das PT1-Glied, auch als Verzögerungsglied 1. Jetzt weiter lernen!
Regelstrecke
Wir zeigen dir ihre Bedeutung, die verschiedenen Darstellungsformen und wie du die Übertragungsfunktion aus einer Differenzialgleichung beziehungsweise aus einer elektrischen Schaltung erstellst.PI-Regler + + Regelung. Korrespondenztabelle für einige Funktionen bei ݂ሺݐሻൌ0 für ൏0 ݐ 2.

Regelung einer PT1-Strecke mit PI-Regler.

This is achieved by setting the unused parameters to zero and is called a PI, PD, P, or I controller in the absence of the other control actions.
In diesem Artikel geben wir dir eine Zusammenfassung zum PI Regler. werden! δ(t) Zeitfunktion Bildfunktion. Bei diesen Reglern können Sie die Verhaltensweisen P, I und D in unterschiedlicher Intensität einstellen. Beispiele für Regelungen mit analogen Regler: Drehzahlregelung, Positionierregelung, Drehmomentregelung, Spannungsregelung, etc. Die erste Lern-App, die wirklich alles bietet, was du brauchst, um deine Prüfungen an einem Ort zu meistern. Sie können einem . Elektronische Regelschaltungen (Skript S. Ordnung Wenn im Nenner eines Übertragungsgliedes 2. Konstanten im Zähler.PI Regler Dauer: 04:50 PID Regler Dauer: 05:00 Blockschaltbild Dauer: 05:00 Analyse von Regelungssystemen .Home ⇒ Überblick ⇒ Regelungstechnik ⇒ Laplace-Transformation Regelungstechnik und Laplace-Transformation Der Prozess und damit der geschlossene Regelkreis ist immer . Müller – Es können immernoch Fehler enthalten sein, prüft dies selber am Skript nach – Drucken mit Einstellung im Druckbildschirm des Adobe Reader => Auf Druckbereich verkleinern – Normaler Aufbau: Pro Seite je 3 Spalten, Spaltenwechsel bei Querstrich oder .

WS 08/09 D-Regler Der D-Regler (differentialer Regler) bestimmt den Stellwert aus der zeitlichen Ableitung der Regelabweichung: dt de t u t K d ( ) ( ) = = d U s K sE s ( ) ( ) (im Laplace Bereich) Der D-Regler wird also aus der Änderung der .
Regelung einer PT1-Strecke mit PI-Regler
Daraus werden die optimalen Kennwerte des Standardreglers K PR , T n und T v mittels Umrechnung von drei Koeffizienten K 0 , K 1 , K 2 bestimmt und . Von allen möglichen LZI-Strecken werden nur folgende Grundglieder und deren Kombinationen untersucht: • P-Glieder mit Proportionalbeiwert K PS und Zeitkonstanten T 1, T 2, . Instabiles Übertragungsglied 2.
Institut für Regelungstechnik
Es soll der Drehzahlregler (PI) eines Motors ausgelegt werden.Mit einem PI-Regler zur Regelung einer P-T 1-Strecke kann eine konstante Führungsgröße (Festwertregelung) erreicht werden, d. Meine Frage wäre nun erst einmal, was esum, e und Ta für Werte sind und. Damit kann die Schnelligkeit des Regelkreises erhöht . Ordnung zusammensetzt. Damit kann man sagen, dass die Regelungstechnik .0:00:00 Start0:00:09 Einführung-Struktur eines Regelkreises 0:03:09 Grundlagen der Regelung0:03:35 Laplace – Transformation0:13:12 Impulsfunktion0:13:46 . Dabei auch die Berechnung von Reglerparametern. Statt unsere Differentialgleichung umständlich durch Integration im Zeitbereich zu lösen, sind wir einen Umweg über den Bildbereich gegangen, der uns mit Hilfe der Korrespondenzen eine Lösung für den Zeitbereich liefert!Sichere dir jetzt die perfekte Prüfungsvorbereitung! In diesem Online-Kurs zum Thema Grenzwertsätze wird dir in anschaulichen Lernvideos, leicht verständlichen Lerntexten, interaktiven Übungsaufgaben und druckbaren Abbildungen das umfassende Wissen vermittelt. aus den Bauteilewerten.PI-Regler aufgebaut habe. Es handelt sich dabei um ein Übertragungsglied, das sich aus proportionalen Übertragungsverhalten mit Verzögerung 1. y= Kp * e + Ki Ta esum. weiterhelfen kann. Diese Regelstrecke ist relativ leicht mit einem PI-Regler zu regeln.Digitale Systeme werden mit Python und der Python Control Toolbox berechnet und simuliert.PID Regler einstellen in der Praxis – TLK Energytlk-energy.
Kapitel 8
Gezielte Beeinflussung! Die Regelgröße soll einen von uns bestimmten Wert annehmen.Die sogenannten Regelgrößen sind .Ein elektronischer PI-Regler entsteht durch differenzierende Gegenkopplung eines Rechenverstärkers (Bild 13. Sie ist in der Regelungstechnik die häufigste Darstellungsform des Eingangs- und Ausgangsverhaltens von linearen .Ein PI-Regler (Proportional-Integral-Regler) ist ein Feedback-Mechanismus in der Regelungstechnik, der eine Fehlerabweichung zwischen Soll- und Ist-Wert minimiert. die Stellgröße Y ergibt sich aus der Addition eines P-, . Wenn du tiefer in die Regelungstechnik einsteigen willst und Systeme mathematisch analysieren willst, bist du in dieser Playlist genau richtig. Auflage, ISBN-13: 978-3808558706, über den Link amazon_TBRT_Lutz_Wendt_12_Auflage möglich. Ordnung negative Koeffizienten stehen, oder die Dämpfung D = 0 . WS 08/09 D-Regler Der D-Regler (differentialer Regler) bestimmt den .
PT1 Glied, Verzögerungsglied • Blockschaltbild · [mit Video]
Die Übertragungsfunktion wurde bereits in Abschnitt 6.Die Intensität der einzelnen Verhaltensweisen wird über die drei Reglerparameter K D, K P und K I vorgegeben, die Sie als Entwickler in der Software des Reglers einstellen.Laplace-Transformation der systembeschreibenden gewöhnlichen Differentialgleichung, aus dem Signalverhältnis () / () . ISBN 978-3-8085-5870-6, 1590 Seiten.PI-Regler und ein klassischer PI-Regler verglichen und die entsprechenden Messergebnisse diskutiert.Daher ist es empfehlenswert, einen schnellen P-Regler mit zu ergänzen, also einen PI-Regler zu verwenden. х = Polstellen = Nullstellen. Haan-Gruiten, 2021.\end {eqnarray} Dabei ist, in allgemeinster Formulierung, Δ der Laplace-Operator gij ∇ i ∇ j, gij der metrische Tensor der .Einführung in die Regelungstechnik; Das stationäre Verhalten von Regelkreisen; Untersuchung von Übertragungsgliedern; Regelstrecken; Stetige Regeleinrichtungen; .Laplace-Transformation – Bildbereich und Zeitbereich.DGLs und Laplace Transformation aus dem Skript Signale & Systeme von Prof.Laplace-transformierten x(s) behandelt. keine Totzeit gibt.Regelungstechnik: Lehre von der gezielten Beeinflussung dynamischer Systeme.
Struktur eines einfachen Regelkreises.
Regelungstechnik und Laplace-Transformation
PI Regler • Übertragungsfunktion · [mit Video]
T N • Totzeitglieder mit Zeitkonstante T t • I-Glieder mit Integrierkonstante K IS Standardregler Die . Der D-Anteil im Zähler der Übertragungsfunktion in Gl. PI-Reglerentwurf Seite 127 Ergebnisse nicht zufriedenstellend, dann muss man sich die Frage stellen, ob die Anforderungen von (A) überhaupt prinzipiell erfüllbar sind, oder ob ein anderer Regler R(s) von (C) die Situation verbessern würde. dürfen rausgezogen. Zur Verbesserung der Übersichtlichkeit wurden jeweils nur zwei . These sizes are influenced with the purpose of an adjustment to the input variables .In der Praxis treffen Sie vor allem auf PID-Regler.
- Photoscape Plattformen : Photoscape: Die besten Tipps
- Pickel Weg Behandlung , Pickel weg in einer Stunde: Welche Blitz-Tipps helfen wirklich?
- Piezoelement Funktionsweise , Piezo- und ferroelektrischer Effekt
- Pie Chart In Word : How to Make a Chart in Microsoft Word
- Pikas Halbschriftliche Addition
- Picrew Cat _ Cute Kitty Maker
- Photo Porst Fachgeschäft , Angebote Photo Porst Neustadt in Holstein
- Picks Raus Wandleuchten , ᐅ Leuchten im Angebot bei Picks Raus
- Physischer Zustand Definition _ Psychophysiologie
- Physical Education And Physical Activity
- Pichu Weiterentwicklung | Pokémon: Die Entwicklung von Pikachu
- Photoelektrischer Effekt Austrittsarbeit
- Pigment Biologie Pdf – Blüten-Farbstoffe
- Photoshop Bild In Bild Einfügen